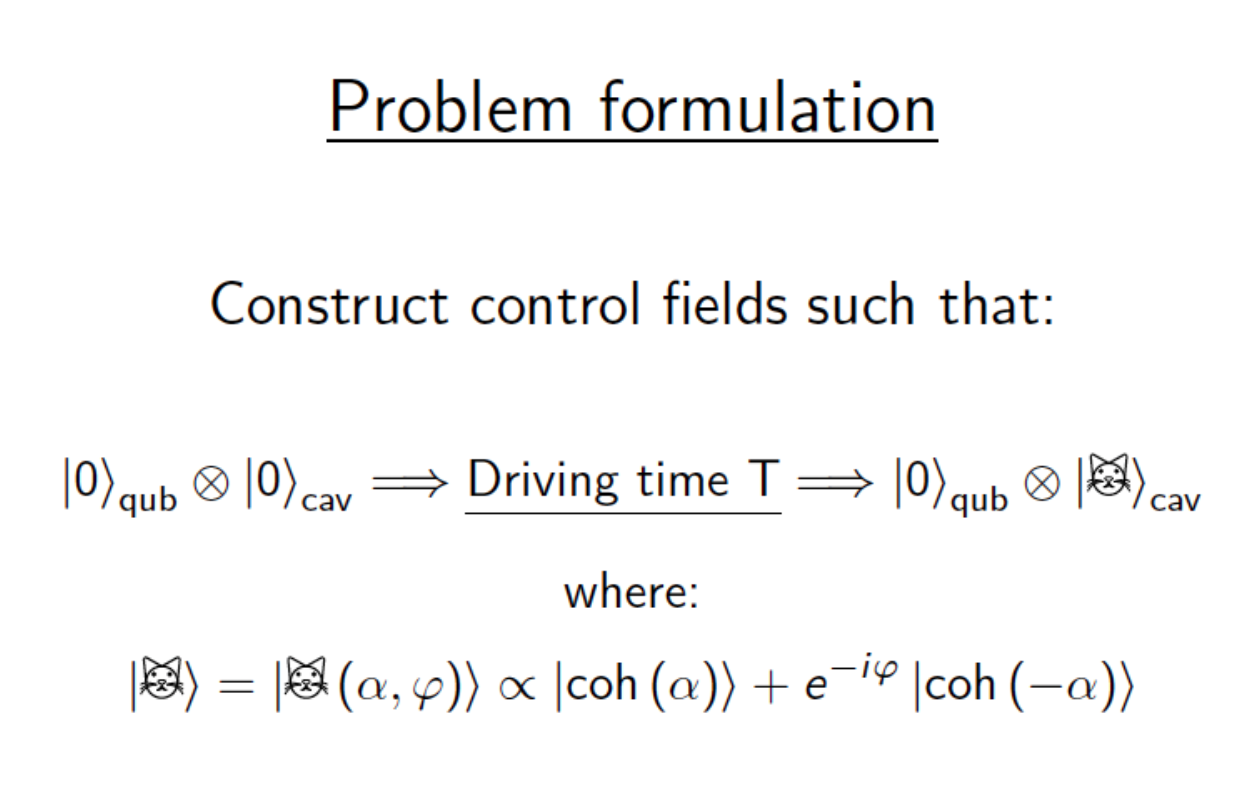
GRAPE for preparing a cat state using L-BFGS Tutorial#
# ruff: noqa
import feedback_grape.grape as fg
from feedback_grape.utils.solver import sesolve
import jax.numpy as jnp
from feedback_grape.utils.operators import *
from feedback_grape.utils.states import basis, coherent
from feedback_grape.utils.tensor import tensor
Step 1: initialize parameters#
from feedback_grape.utils.modeling import QubitCavity
T = 1 # microsecond
num_of_intervals = 100
N = 30 # dimension of hilbert space
alpha = 1.5
# Phase for the interference
phi = jnp.pi
hs = QubitCavity(1, N)
q = hs.qubits[0]
c = hs.cavities[0]
hconj = lambda a: jnp.swapaxes(a.conj(), -1, -2)
chi = 0.2385 * (2 * jnp.pi)
mu_qub = 4.0
mu_cav = 8.0
Step 2: define initial and target states#
psi0 = tensor(basis(2), basis(N))
cat_target_state = coherent(N, alpha) + jnp.exp(-1j * phi) * coherent(
N, -alpha
)
psi_target = tensor(basis(2), cat_target_state)
Step 3: Build the hamiltonian#
def build_grape_format_ham():
"""
Build Hamiltonian for given (complex) e_qub and e_cav
"""
n_phot = c.adag @ c.a
H0 = (chi / 2) * n_phot @ (q.sigmaz + q.identity)
H_ctrl_qub = mu_qub * q.sigmap
H_ctrl_qub_dag = hconj(H_ctrl_qub)
H_ctrl_cav = mu_cav * c.adag
H_ctrl_cav_dag = hconj(H_ctrl_cav)
H_ctrl = [H_ctrl_qub, H_ctrl_qub_dag, H_ctrl_cav, H_ctrl_cav_dag]
return H0, H_ctrl
Step 4: Run GRAPE#
H0, H_ctrl = build_grape_format_ham()
res = fg.optimize_pulse(
H0,
H_ctrl,
psi0,
psi_target,
num_t_slots=num_of_intervals,
total_evo_time=T,
evo_type="state",
optimizer="l-bfgs",
)
print("Final fidelity: ", res.final_fidelity)
Final fidelity: 0.9662985804499449
Reconstructing hamiltonian from output signals#
def build_ham_reconstructed(u1, u2, u3, u4):
"""
Build Hamiltonian for given (complex) e_qub and e_cav
"""
n_phot = c.adag @ c.a
H0 = +(chi / 2) * n_phot @ (q.sigmaz + q.identity)
H_ctrl_qub = mu_qub * q.sigmap
H_ctrl_qub_dag = hconj(H_ctrl_qub)
H_ctrl_cav = mu_cav * c.adag
H_ctrl_cav_dag = hconj(H_ctrl_cav)
# Apply control amplitudes
H_ctrl = (
u1 * H_ctrl_qub
+ u2 * H_ctrl_qub_dag
+ u3 * H_ctrl_cav
+ u4 * H_ctrl_cav_dag
)
H = H0 + H_ctrl
return H
u1 = res.control_amplitudes[:, 0]
u2 = res.control_amplitudes[:, 1]
u3 = res.control_amplitudes[:, 2]
u4 = res.control_amplitudes[:, 3]
H_total = jnp.array(
[
build_ham_reconstructed(u1[i], u2[i], u3[i], u4[i])
for i in range(len(u1))
]
)
time_start = 0.0
time_end = 1.0
# Eqivalant to delta_ts = jnp.repeat(0.2, time_intervals_num).astype(jnp.float32)
# However, it is implemented in this way to be more general and
# show that these are the differences between the time intervals
t_grid = jnp.linspace(time_start, time_end, num_of_intervals + 1)
delta_ts = t_grid[1:] - t_grid[:-1]
psi_fg = sesolve(H_total, psi0, delta_ts, evo_type="state")
print(fg.fidelity(C_target=psi_target, U_final=psi_fg, evo_type="state"))
0.9662985804347162